Er det din første øvelse med ultra:bit Smart Car Kit?
OBS! Er det din første øvelse med ultra:bit Smart Car Kit?
Du skal bruge makecode editor og tilføje en udvidelse,
der hedder Ring:bit Car, til menuen
Opgave 3
Racerbane
Skal din Smart Car køre sit eget løb? I denne opgave kan du programmere din lille robotbil til at følge en bane, du selv tegner. Så kan du bare læne dig tilbage og heppe på den undervejs.
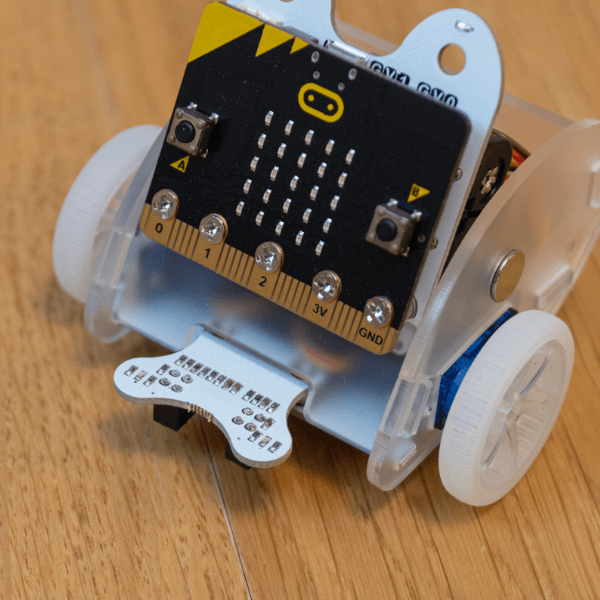
Du skal bruge det Ring:bit car tracking modul, der følger med i pakken. Tracking modulet har infrarøde sensorer, der hjælper din bil til at registrere og følge linjer, der er mellem 10-15 mm tykke.
Til denne opgave skal du bruge følgende komponenter:


Trin 1
Sådan kobler du
komponenterne sammen
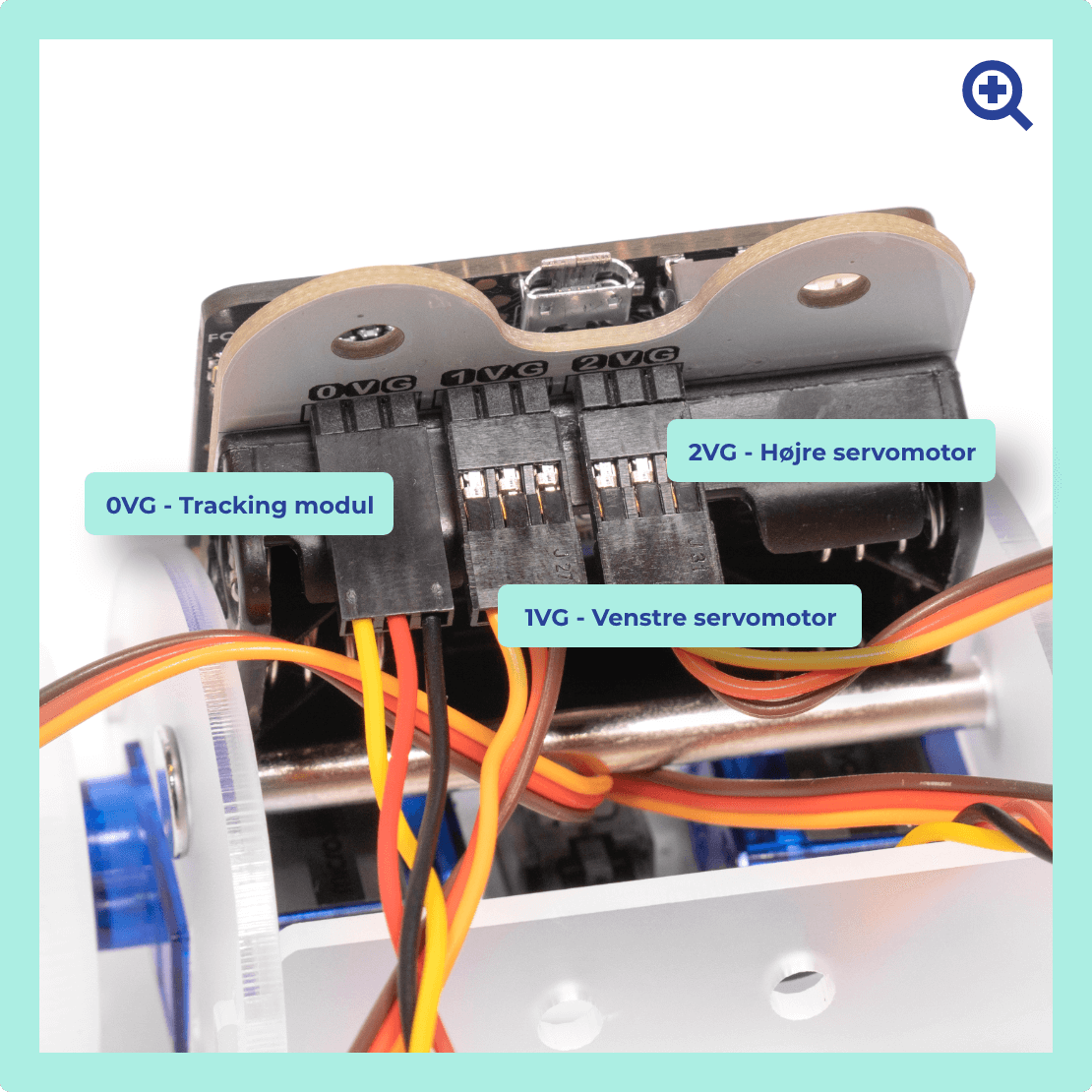
Sensor:bit
0VG: Smart Car RegnbueLED Board
1VG: Højre Servomotor
2VG: Venstre Servomotor
Øvrige tilslutninger:
Bundplade: Trackingmodul
Trin 2
Tegn din racerbane
Tegn din racerbane på et stort stykke papir. Sort tusch på hvid baggrund virker bedst, men du kan også lege med andre farver eller dekorationer. Husk at sørge for, din bane er bred nok til, at din Smart Car kan finde den – dvs. mellem 10-15 mm.
Tip: Bilen har nemmere ved at følge din bane, hvis du undgår skarpe sving. Start evt. med en bane med brede sving – så kan du altid eksperimentere med, hvor store eller små sving, den kan tage!
Trin 3
Programmér din racerbil
Først og fremmest, skal du vende bunden i vejret på din Smart Car og finde den lille kontakt midt på bundkortet. Tryk kontakten til den side, hvor der står ”Other modules”, før du går videre. (Så må du godt vende bilen rigtigt igen bagefter!)
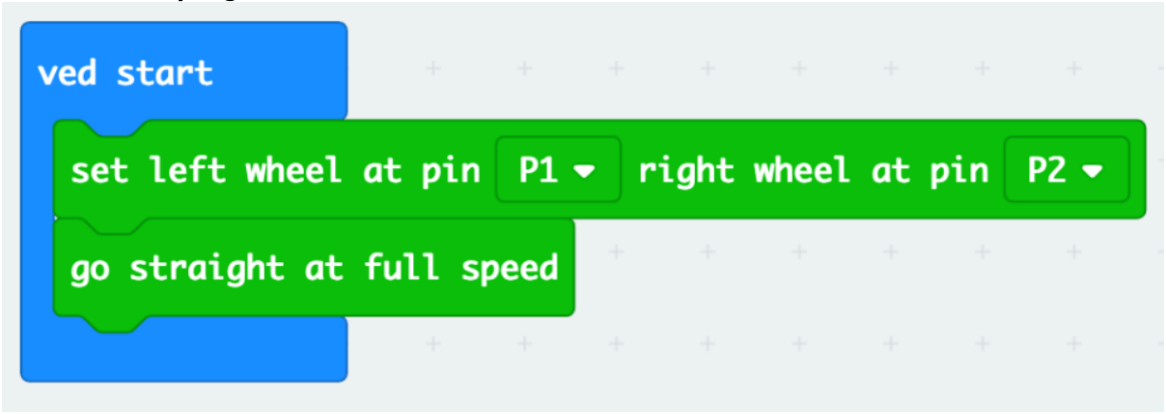
Indsæt en ”ved start” kommando fra Grundlæggende menuen.
Indsæt ”set left wheel at pin P1 right wheel at pin P2” og “go straight at full speed” fra din RingBitCar menu som vist her.
Trin 4
Programmér tracking modulet
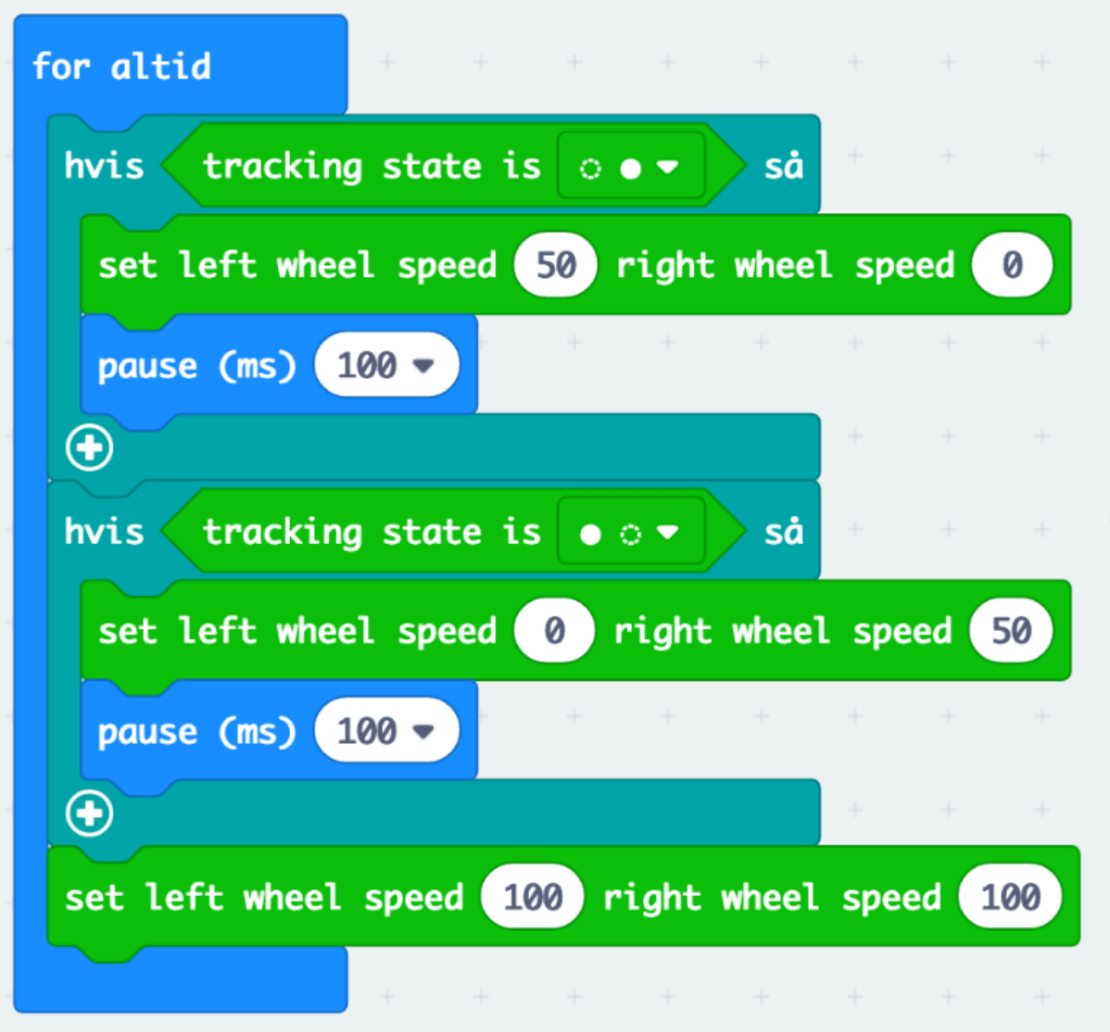
Indsæt en ”for altid” kommando
fra Grundlæggende menuen.
Indsæt ”tracking state is” og “set left wheel speed right wheel speed”. Du finder dem ved først at klikke din RingbitCar menu og derefter klikker du på den lille knap med tre prikker, hvor der står ”more”. Når du har trukket kommandoerne ind i editoren, kan du indstille tallene som vist her.
Indsæt en ”hvis-så” kommando. Den finder du under Logik menuen. Indstil tallene som vist på billedet.
Indsæt ”pause” fra Grundlæggende menuen som vist her.
Du er nu klar til at teste din kode
Nu kan du downloade dine koder til din ring:bit, og så er du klar til at sætte din tegnerobot til at lave en cirkel!
Er der noget, der driller?
Tjek, om du har husket det hele, og prøv igen. Eller download den færdige kode her.
Tip: Har du problemer med at bilen kører ud over stregen? Prøv at tegne stregen tykkere – den har det bedst med 10-15 mm.
Flere forsøg med med tracking modulet
Hvordan kan du ændre på bilens hastighed?
Virker den, hvis du laver din bane bredere nogle steder, eller smallere rundt i hjørnerne?
Hvad sker der, hvis din bane har hvide midterstriber på?
Hvad sker der, hvis din bane er meget snoet?
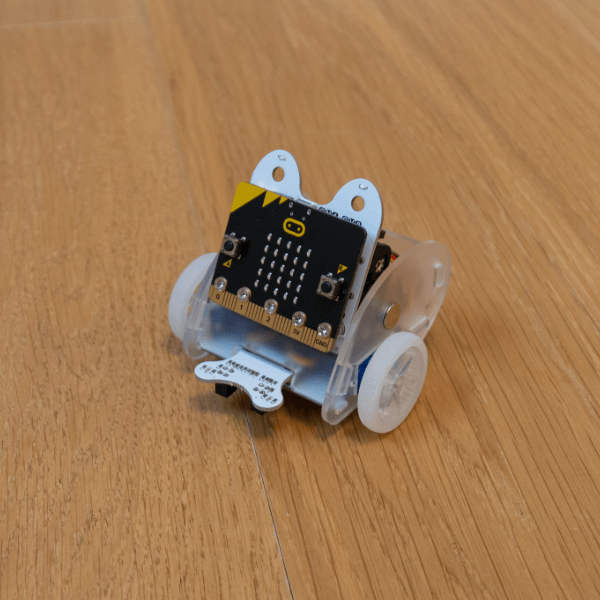
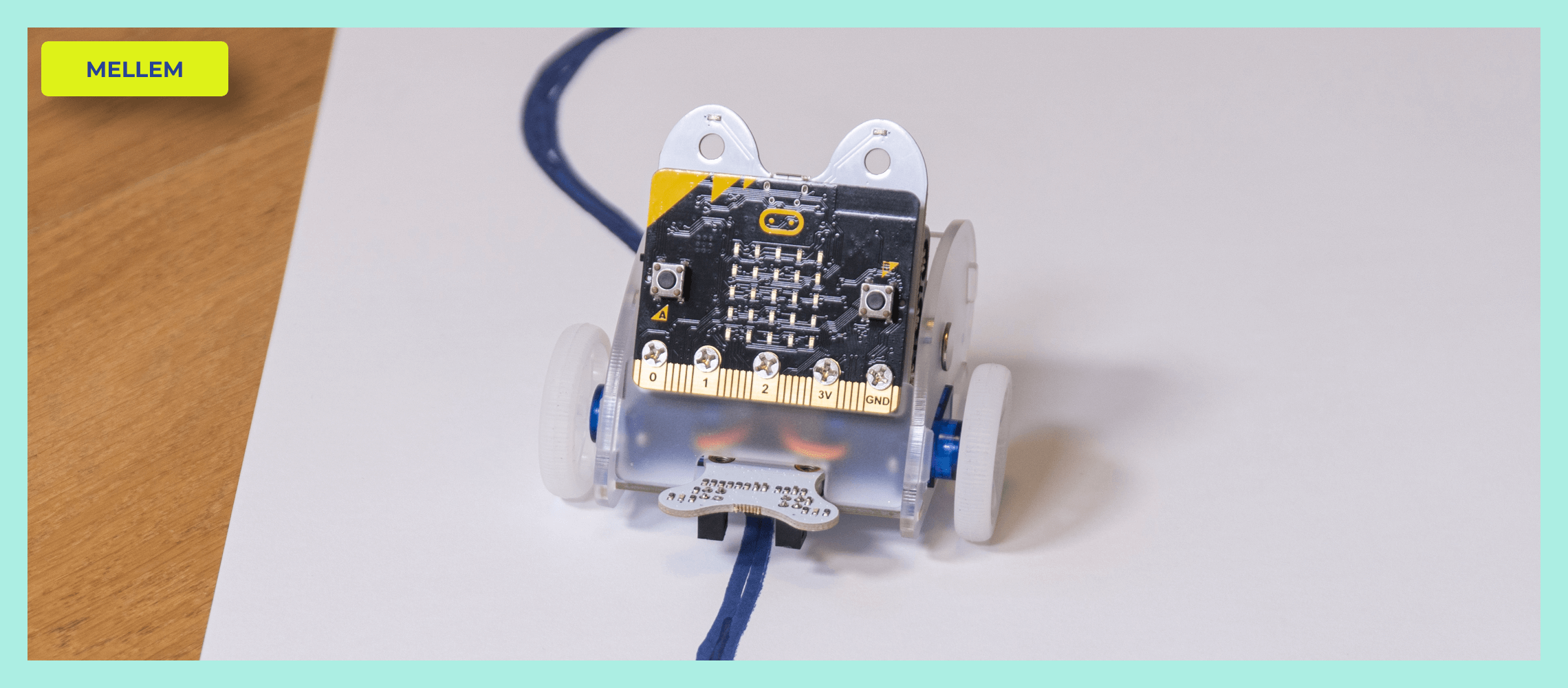
Flere billeder af forsøget